安波福机器学习总监oscar beijbom近日发表博客文章,透露将于2020年上半年推出nuscenes数据集升级版。
2019年3月,安波福推出了业内首个公开的大规模自动驾驶传感数据集nuscenes,标志着安波福在自动驾驶合作开发领域的又一个开创性成就。nuscenes的开放,为业内研究自动驾驶提供了大量的数据基础,弥补了公共数据提供的行业空白。 通过开放安波福nuscenes数据集,我们希望促进行业研究,提高数据的透明度以及公众对自动驾驶的信赖。
自发布以来,安波福nuscenes数据集受欢迎程度远远超过了我们自己的预期。短短几个月的时间,数千名用户注册(包括数百所顶尖学术机构)下载和使用了这一数据集。随后,我们惊喜地看到更多的自动驾驶领导者,包括lyft, waymo, hesai, argo和 zoox 等公司也开放了自己的数据集。同时,一些著名自动驾驶开发商也开始要求获得许可使用nuscenes的数据。
这种突破性的合作与信息分享,是行业共同捍卫并履行汽车行业“安全第一”的使命的保证。
今天,我们自豪地宣布:安波福将在数据源开放上更进一步,2020年上半年,安波福团队将发布nuscenes的两个升级版:nuscenes-lidarseg 和nuscenes-images。
关于nuscenes-lidarseg
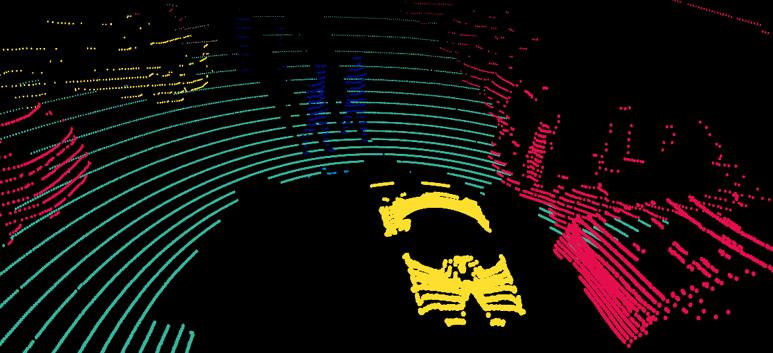
原版nuscenes用矩形体(又称“边界盒”)代表3d物体探测。这是一种实用的表现形式,可以满足一般情况下自动驾驶汽车对物体的捕捉识别。随着自动驾驶的发展,汽车必须尽量多地获取外部世界的细节信息。例如,如果路上的行人或者骑行者通过手势与道路上的其他人进行交流,自动驾驶汽车应该能够识别理解他们的手势信号并作出正确回应。
为了达到这样的精细度,我们推出了nuscenes-lidarseg,它对nuscenes 数据集中的4万个关键影格的每一个激光雷达点(总数为14亿)标注了语义标签,标签总类达到38类。
这不仅对nuscenes数据集项目本身,对安波福以及业内的开放源项目而言,都是重大的进步。因为研究者可以借此研究和量化新问题,如进行激光雷达点云分割、前景提取以及传感器校准等。
关于nuscenes-images
虽然我们在对小轿车等常规汽车的场景理解算法上已经取得了不菲的成就,但是这些算法对非常规车辆(如三轮车或急救车)的表现却不尽如人意。此外,五级自动驾驶汽车还需面对不同的环境,不管是雨雪天还是夜晚,算法都需要保证汽车正常行驶。
为搜集更加细化、可以成功应对极端情形或糟糕路况的数据集,我们采用了数据挖掘算法,在大量数据中选择出有用的图像。
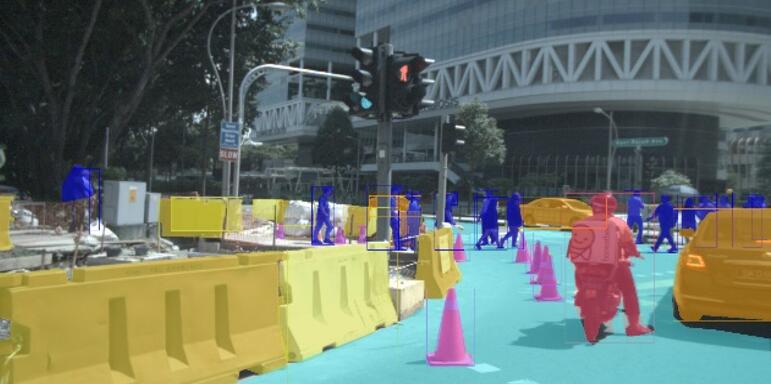
我们的目标是,借助这些nuscenes-images数据集,使自动驾驶汽车在遇到困难的或未预知的情况时,仍然保证实现安全自动驾驶。
nuscenes-images将包含10万个图像,这些图像带有80多万个2d边界盒以及汽车、行人和单车等物体的分割掩膜,以及驾驶背景(如可驾驶的路面)2d分割掩膜。其分类方式与其它的nuscenes数据一致,以方便各种传感模态研究。